与其他系列操纵杆相比,XD 系列具有更先进和复杂的电子结构。这使得操纵杆能够持续进行自我监测,防止任何潜在的内部故障。这种采用冗余元件运行内部诊断的性能也与安全完整性等级 SIL2 的兼容性有关。
若发生内部故障,XD 系列必须快速反应做出诊断,并将异常情况告知系统。同时,为方便起见,未受故障影响的其余功能应保持运行。在此情况下,计时和故障模式对于确保用户的安全至关重要。作为规定,错误代码会在故障发生后的500毫秒内传输给 CAN 总线。错误代码的格式符合标准 J1939-71 的规定,详情如下。
输出超出工作范围
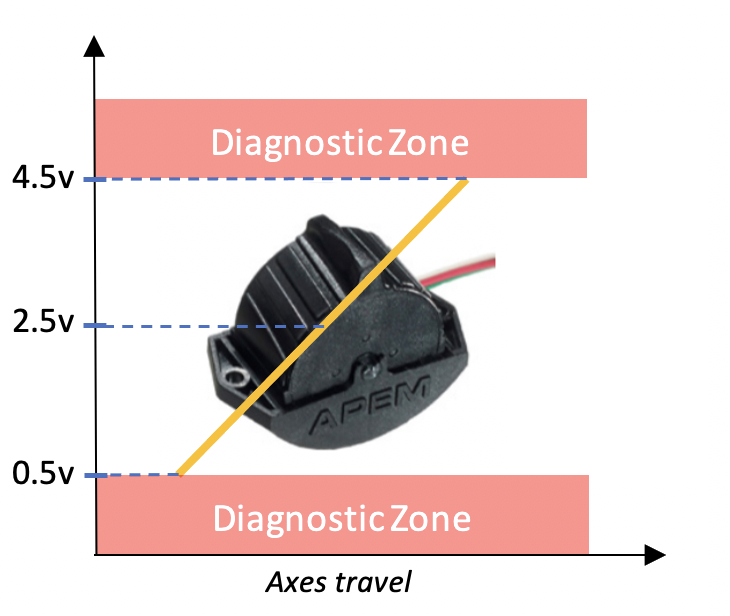
瞬时供电或供电缺失会影响模拟组件的输出,就像组件突然与面板断开一样,输出会直接跳到诊断区,相应组件的错误代码会被触发。例如,配备一个滚轮的轴输出将为十进制1022,而位置位将为十进制10。传感器与 CAN 控制器之间失去通信。
如果主轴传感器和 CAN 控制器之间通信中断,并且在多次尝试后通信未恢复,将在 X 轴和 Y 轴及其冗余上触发一个错误代码。例如,X 轴和 Y 轴的输出将是十进制1022,所有的位置位将是十进制10。面板与底座之间失去通信。


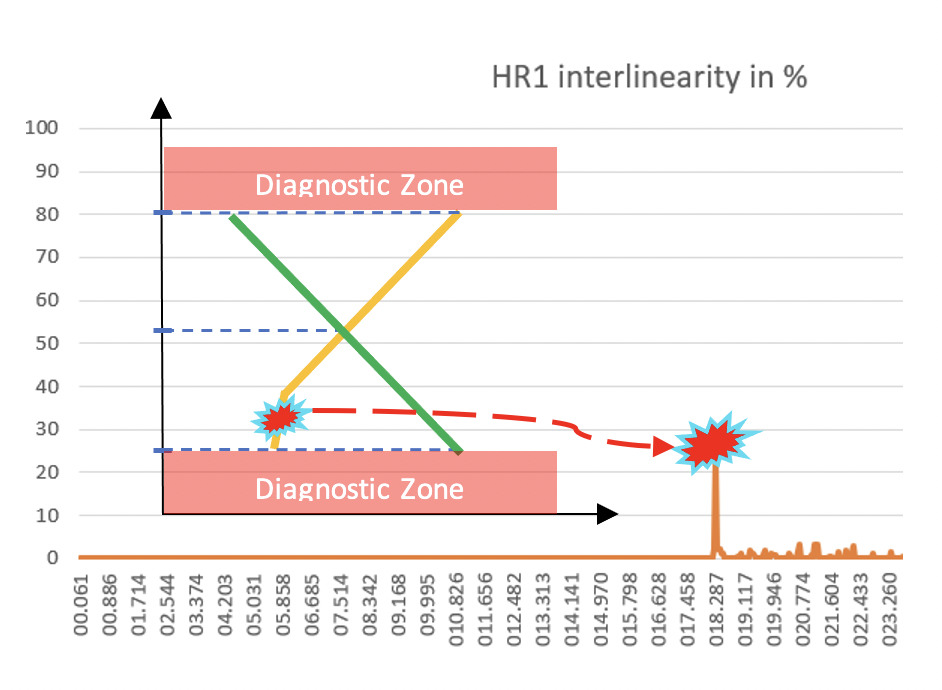
瞬时供电或供电缺失会影响模拟组件的输出,就像组件突然与面板断开一样,输出会直接跳到诊断区,相应组件的错误代码会被触发。例如,配备一个滚轮的轴输出将为十进制1022,而位置位将为十进制10。内部线性度超出公差(如面板上的组件)。
瞬时供电或供电缺失会影响模拟组件的输出
就像组件突然与面板断开一样,输出会直接跳到诊断区,相应组件的错误代码会被触发。例如,配备一个滚轮的轴输出将为十进制1022,而位置位将为十进制10。